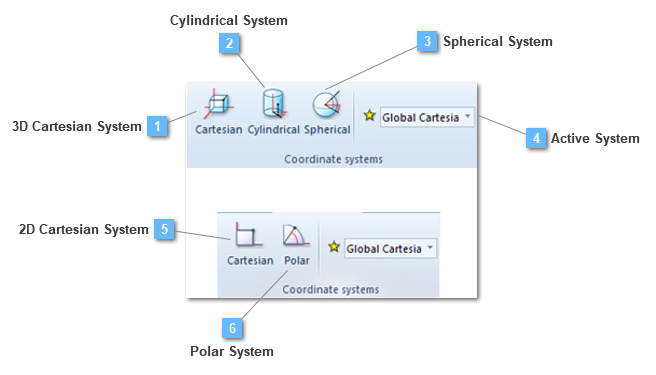
In many cases, the user may want to establish his/her own coordinate system, whose origin is offset from the global origin, or whose orientation differs from that of the predefined global systems. A cylindrical or spherical coordinate system may be more suitable for a particular model.
When a new coordinate system is defined, the user has the option to set it as the active coordinate system. The user may define as many coordinate systems as wanted, but only one of these systems may be active at a given time.
All systems follow the right-hand rule and, by definition, share the same origin.
Coordinate systems are needed to:
Create geometry entities.
Be associated to structural elements: shell and solid elements.
Define the load direction (point, linear or surface loads).
Apply boundary conditions.
When the active coordinate system changes, all point and vector coordinates that depend on the former entities are updated automatically to the new active system. The only exception is the load direction vector that does not depend on the active coordinate system but on the coordinate system that defines the load direction. Those kind of coordinates are always represented in square brackets, like [1,0,0], to distinguish them from the coordinates depending on the active coordinate system, represented in brackets, such as (1,0,0).
A coordinate system can always be deleted (except the Global Cartesian) unless is associated to any of the former entities.
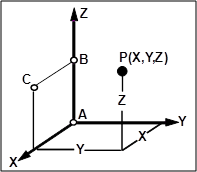
3D Cartesian System
Cartesian coordinates are rectilinear two- or three-dimensional coordinates that are also called rectangular coordinates. The three-dimensional Cartesian coordinate system is a natural extension of the two-dimensional version formed by the addition of a third "in and out" axis mutually perpendicular to the x- and y-axes defined above. This new axis is conventionally referred to as the z-axis and the coordinate Z may lie anywhere in the interval. An ordered triple (x,y,z) in three-dimensional Cartesian coordinates is often called a point or a 3-vector.
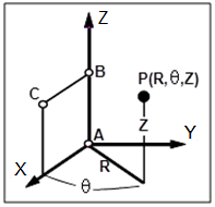
The Cylindric Coordinate system is based on the 2D polar coordinate system but using the 3rd dimension with the "Z" coordinate from the Cartesian coordinate system.
In this system, the X & Y coordinates are replaced by a vector whose projection aims at the point in XY plane projection. The magnitude is equal to distance from the point to the Z axis.This is the first system coordinate. The directional angle of the vector in respect to the positive X half-axis, establishes the second coordinate. The third coordinate is the same as the "Z" coordinate of Cartesian system.
A cylindrical coordinates vector is defined by:
Where is radial vector projection with respect to the Z axis in the XY plane. is the angular component taken in respect of the positive X half-axis and corresponds to the Cartesian component with the same name.
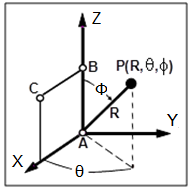
Spherical coordinates, also called spherical polar coordinates, are a system of curvilinear coordinates that are natural for describing positions on a sphere or spheroid. Theta is the azimuth angle in the xy-plane from the x-axis with 0<=theta<2pi, phi is the polar angle (also known as the zenith angle and colatitude, with phi=90 degrees-delta where delta is the latitude) from the positive z-axis with 0<=phi<=pi, and r is the distance (radius) from a point to the origin.
The symbols for the radial, azimuth, and zenith angle coordinates are taken as r, theta, and phi, respectively. Note that this definition provides a logical extension of the usual polar coordinates notation, with theta remaining the angle in the xy-plane and phi becoming the angle out of that plane.
Cartesian coordinates are rectilinear two- or three-dimensional coordinates that are also called rectangular coordinates. The two axes of two-dimensional Cartesian coordinates, conventionally denoted the x- and y-axes, are chosen to be linear and mutually perpendicular. Typically, the x-axis is thought of as the "left and right" or horizontal axis while the y-axis is thought of as the "up and down" or vertical axis. In two dimensions, the coordinates x and y may lie anywhere in the interval, and an ordered pair in two-dimensional Cartesian coordinates is often called a point or a 2-vector.
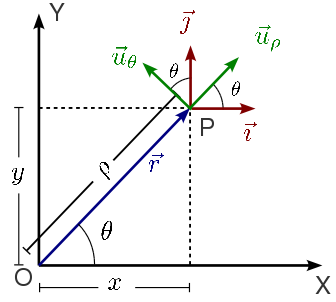
Polar coordinates consist of the representation of a point by means of a magnitude r vector, which starting point matches with the coordinates origin, and its rotation angle θ.
ρ coordinate is the distance between the "P" point and the coordinates origin "O". This value may vary between 0 and ∞.
θ coordinate correspond to the angle which shapes the r vector with the OX axis. It may vary between 0 and 2∏.
This type of coordinate system is only available in 2D models.